

 联系我们
联系我们


-
1. ABB机器人进行输送链跟踪,通常当物体经过同步开关(上图中的A处)时,系统开始记录待跟踪物体。
2. 若来料有偏差,通常也是来料经过同步开关时,触发相机拍照得到偏差数据。
3. 对于来料非常密集,或者某个物体经过同步开关时会被其他物体遮挡导致的不能及时触发相机拍照,通常采用输送链定长距离拍照。
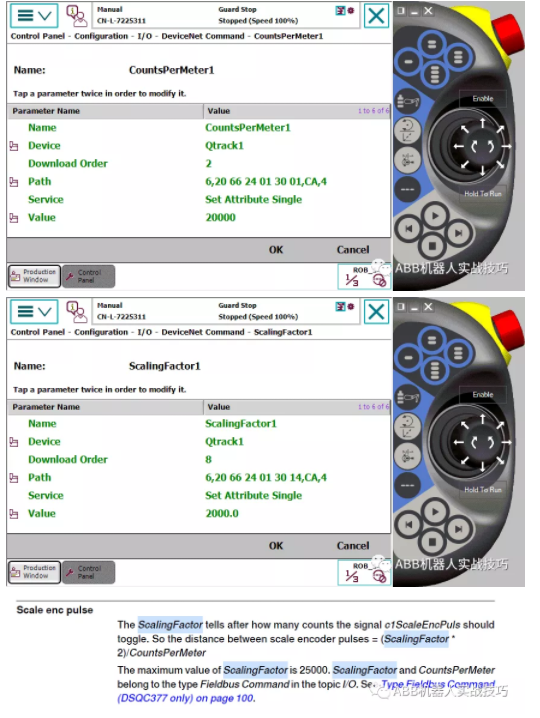
4. 输送链跟踪系统中,有信号c1ScaleEncPulse,即编码器经过一定脉冲后,触发该信号。

5. 输送链定长距离由CountsPerMeter1(脉冲数/米)及ScalingFactor1(脉冲系数)共同决定。
对应距离 Distance=ScalingFactor*2/CountersPerMeter
- 下一篇:ABB机器人重启类型
- 上一篇:ABB机器人-变频器输出回路连接电磁开关电磁接触器
